Especificações
Modo de movimento: a velocidade, a posição atual, o torque, a trajetória e a outros modos de controle
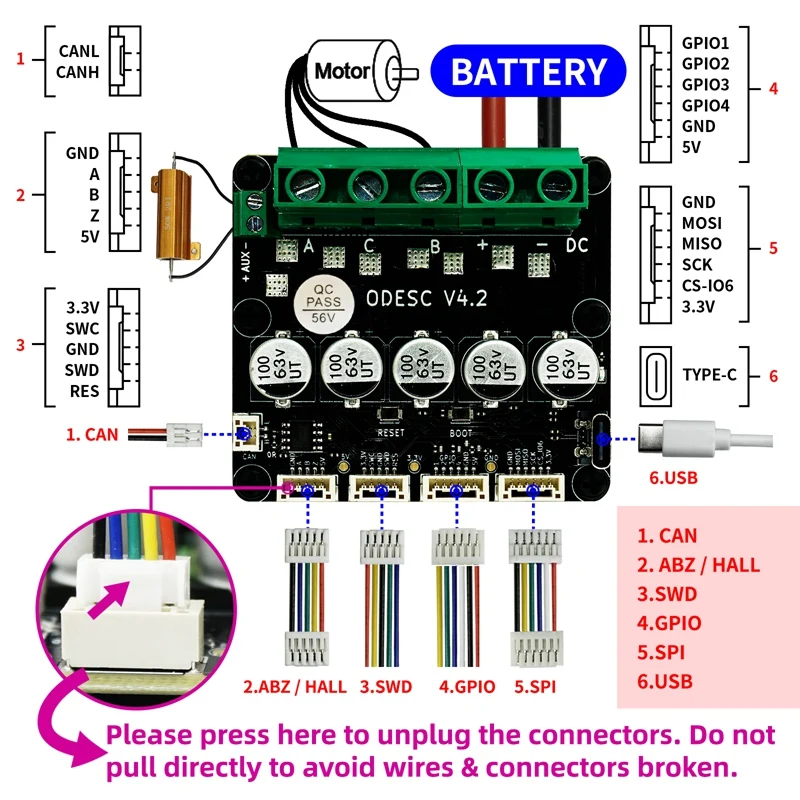
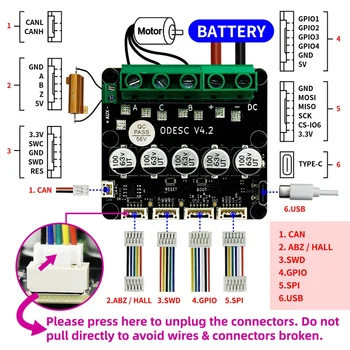
O tipo de Encoder: encoder incremental (AB, ABI), encoder absoluto (SPI), sensor de Hall (PREFEITURA), AMT102, AMT103, TLB5012, AS5047P, etc.
Interface de comunicação: USB, PWM, UART, CAN, Entrada Analógica, Passo & Direção, GPIO, ASCII, etc.
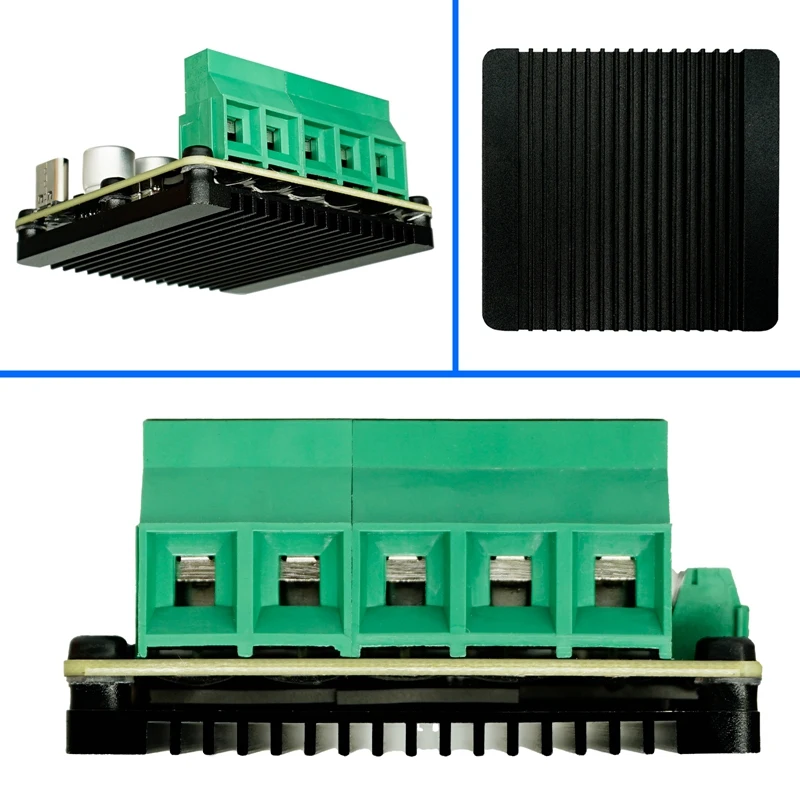
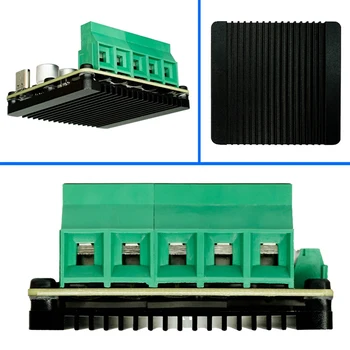
De sobrecorrente de dissipação de calor: PCB integrado de corrente de alta clarabóia aberta de design, adota a espessa camada de cobre e processo especial de ouro da imersão, CN personalizadas de alumínio do dissipador de calor de metal, aumenta a contínua capacidade de sobrecorrente e melhora a estabilidade operacional.
Cenários de aplicação: robô de controle conjunto, braço robótico, entrega de comida, robô, robô de inspeção de, AGV carro, de impressão em 3D, pan-tilt trilho da corrediça, fresadora CNC, a reorientação de força simulador, industrial e automação BLDC de controle de campo, etc.
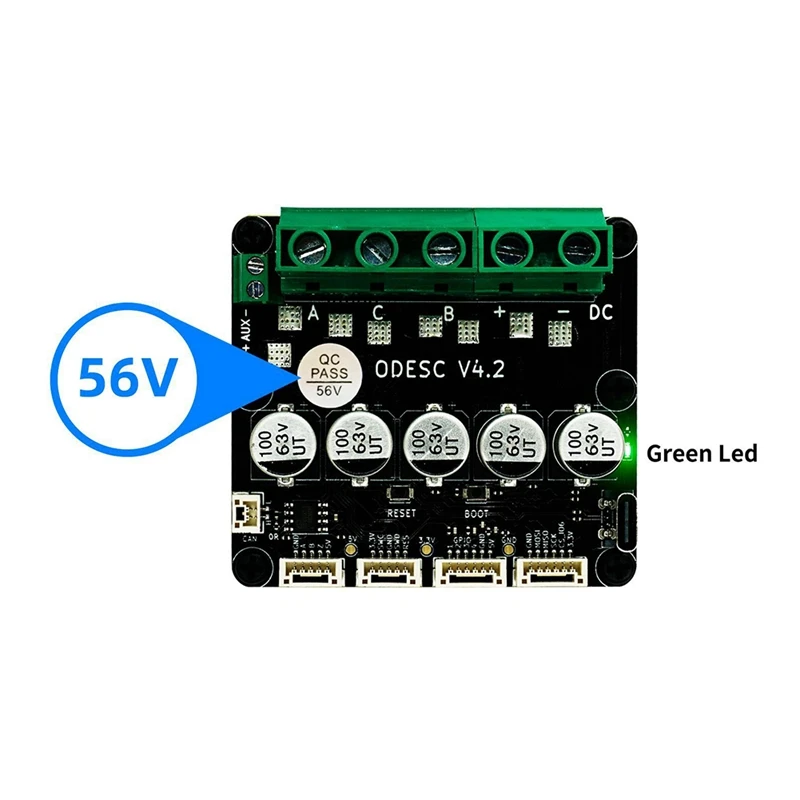
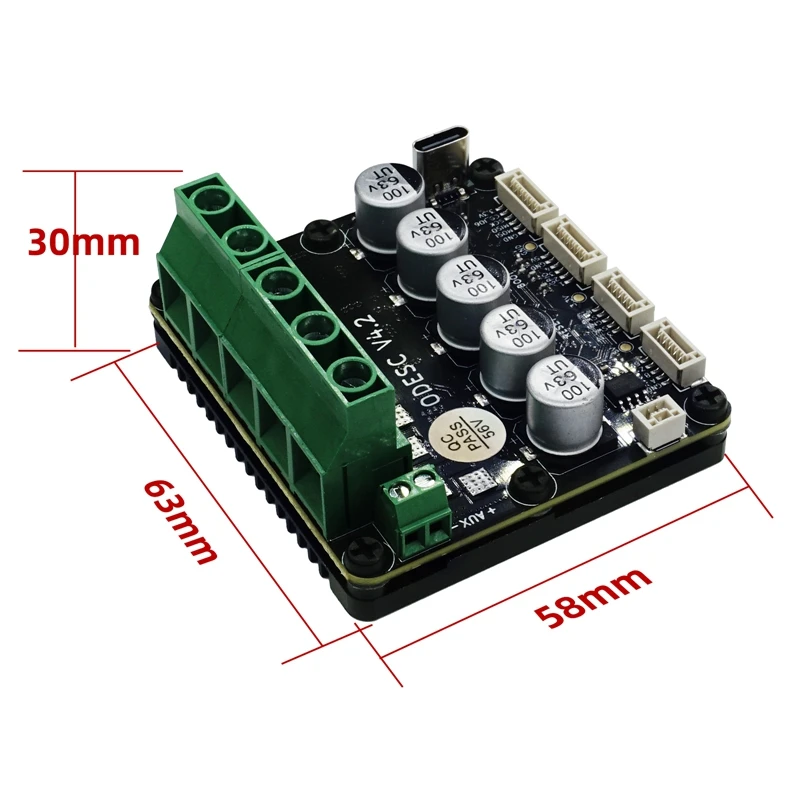
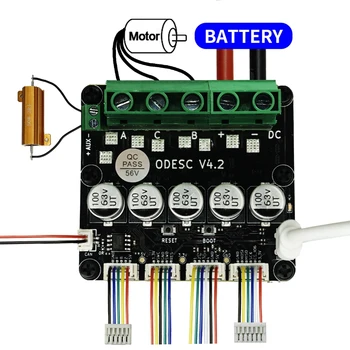
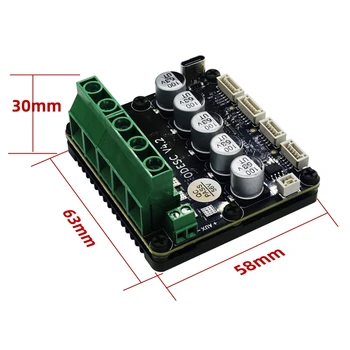
1. A versão do Hardware: ODESC V4.2
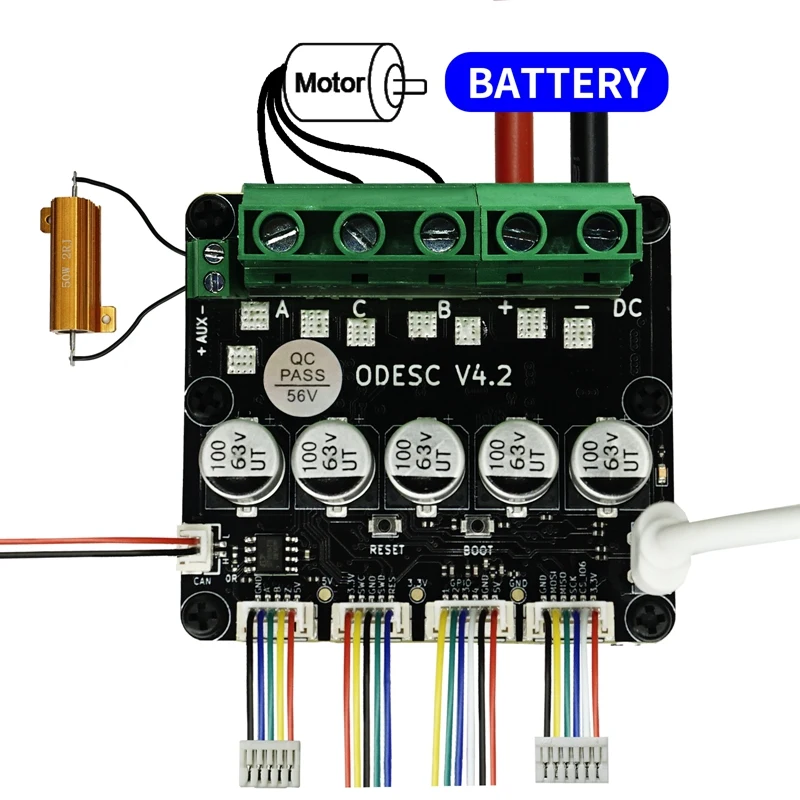
2. Unidade de motor: motor brushless da C.C. (BLDC)
3. Método de frenagem: poder de resistência, bateria de recuperação
4. Microprocessador: STM32F405RGT6
5. Tensão de funcionamento: 8-56V
6. Corrente máxima de 120A
7. Corrente contínua: 70A
Material: PC+metal
cor: Como mostrado
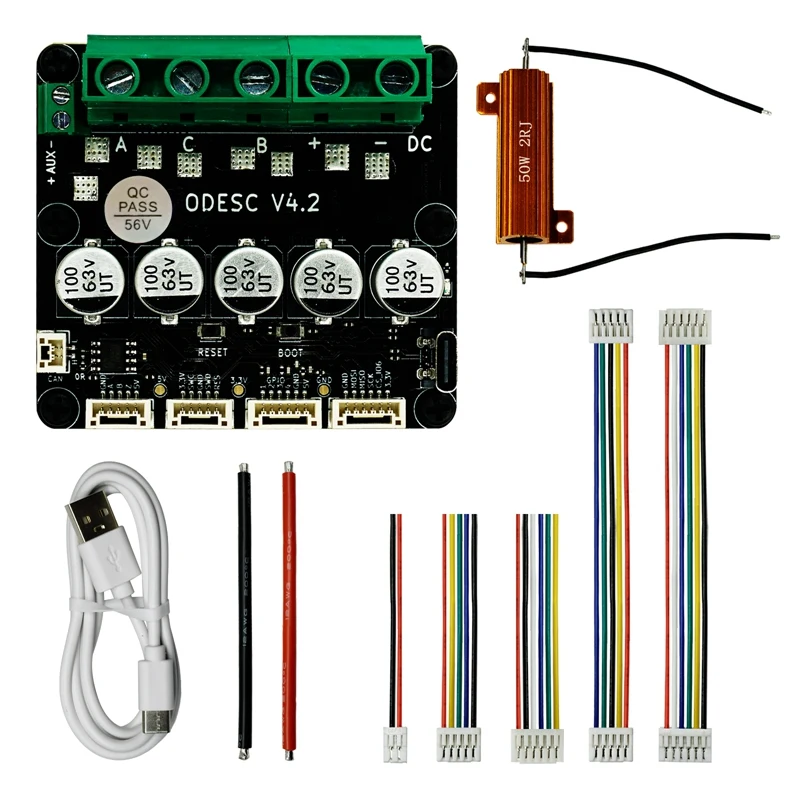
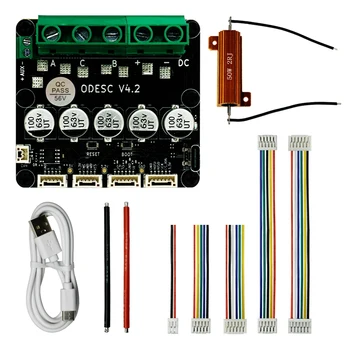
Conteúdo Do Pacote:
1 x ODESC V4.2
1 x de Tipo C cabo de dados
1 x 50W 2Ω resistor de potência
2 x 12AWG fio de silicone
1 x SH1.0mm 2P única cabeça
1 x SH1.0mm 5P único cabeça
1 x SH1.0mm 6P única cabeça
1 x SH1.0mm 5P mesma direção de duas cabeças
1 x SH1.0mm 6P mesma direção de duas cabeças
Apenas o pacote acima do conteúdo, outros produtos não estão incluídos.
Nota: a reflexão da Luz e exibe diferentes podem causar a cor do produto em que a imagem um pouco diferente da coisa real.O erro de medição permitido é +/- 1-3cm.